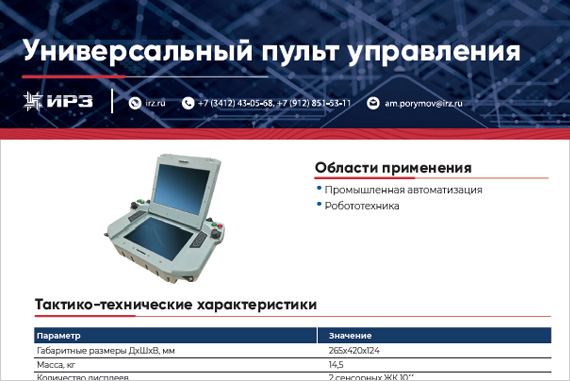
ИРЗ разрабатывает переносные пульты для дистанционного управления робототехническим и иным оборудованием в соответствии с требованиями заказчика.
Дистанционное управление механизмами, отображение информации о состоянии управляемого оборудования, получение видеоинформации с управляемых объектов.
Робототехника, промышленная автоматизация.
Изготовлен макет (из состава блока визуального контроля), проводятся отработочные испытания.
| Наименование | Значение |
|---|---|
| Габаритные размеры, мм | 266х420х120 |
| Масса, кг | 8 |
| Количество дисплеев | 2 сенсорных ЖК 10" |
| Интерфейсы управления | Ethernet, RS-485 |
| Интерфейсы внешней связи | 2 х USB |
| Количество функциональных клавиш | 12 (10 с подсветкой) |
| Количество джойстиков | 2 (аналоговые) |
| Возможность подключения внешней АКБ | + |
| Рабочая температура, °С | минус 50…+80 |
| Операционная система | Linux |
| Процессорное ядро | 2 x ARM-Cortex-A7 900 MHz, GPU |
Джойстик
Предназначен для установки в переносные пульты дистанционного управления различными устройствами и механизмами.
Приемная:
Отдел договоров:
Бюро сбыта и отгрузки:
Отдел технического (гарантийного) обслуживания:
Электронная почта: kt@irz.ru

Предназначен для установки в переносные пульты дистанционного управления различными устройствами и механизмами.

Предназначен для формирования оператором управляющих сигналов в робототехнических и автоматических системах.
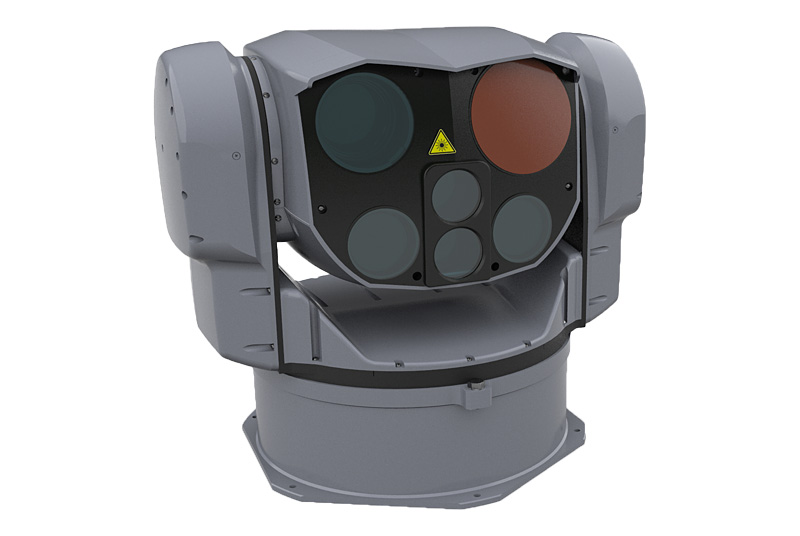
Автоматическое наблюдение за движущимися и неподвижными объектами в зоне прямой видимости и в инфракрасном диапазоне, фиксация их перемещений, расстояний и передачи данных на монитор системы управления.